physx solver
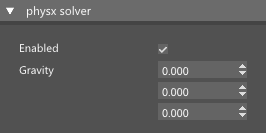
PhysX solver node. When starting with the new PhysX simulation this is the node that you should create first. In that case, all other PhysX nodes will automatically select the PhysX solver node as their solver.
[Inputs]
Enabled - Enable or disable node evaluation.
Gravity - Sets the gravity vector and strength for all actors that o this solver.
physx static collision
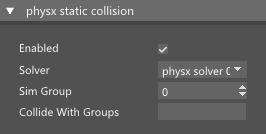
Use this node to add scene objects as static collisions to the PhysX.
[Inputs]
Enabled - Enable or disable node evaluation.
Solver - Select the PhysX solver to which actor will be added.
Sim Group - Object simulation group number.
Collide With Groups - Collision groups separated by a comma.
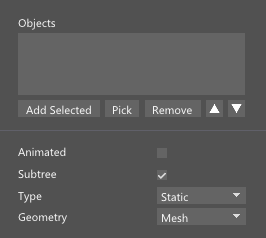
Animated - Enable this is object is animated.
Subtree - When enabled, the picked object is treated as a root node and all child nodes and their geometry are added to the PhysX actor.
Type - Object type.
- Kinematic - Kinematic actor`s motion is controlled directly by user while external forces will have no influence on it.
- Static - Static actor which can be used for immovable walls, floors etc..
Geometry - Actor geometry - available options will depend on the object Type.
- Bounding Box - Bounding box will be generated from object bounding box.
- Convex Mesh - Convex mesh will be generated from object mesh.
- Mesh - Actor will use object mesh.
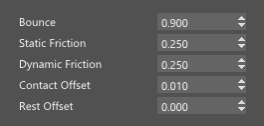
Bounce - Amount of bounce on object collision.
Static Friction - Static friction is defined as the frictional force which acts between the two surfaces when they are in the rest position with respect to each other. One example is a lamp on the table. If you tilt the table the lamp will start sliding at some point. Higher static friction would require greater table tilt in order to set lamp in motion.
Dynamic Friction - Dynamic friction is defined as the frictional force which is created between any two surfaces when they are in a moving position. One example of dynamic friction is a car tire on the asphalt.
Contact Offset - Contact offset between colliding actors. Keep this number as low as possible since large numbers will offset contact point too far from actual location on shape surface. This could lead to multiple simulation issues.
Rest Offset - Collision offset from object in rest state.