physx new joint
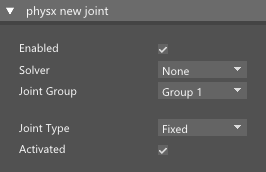
Creates a new joint between two input particles and adds it to the PhysX.
[Inputs]
Enabled - Enable or disable node evaluation.
Solver - Select the PhysX solver from which to retrieve joints.
Joint Group - Use this listbox to retrieve joints that belong to a certain group.
Joint Type - Particle age test type.
- Fixed - This joint will retain distance and orientation between two particles.
- Spherical - Spherical joint allows both particles to rotate around their midpoint.
- Prismatic - It prevents any rotation but allows distance between particles to change.
- Distance - This joint will only retain the distance between two particles.
Activated - Uncheck this option if you want to create deactivated joint.
Spherical Joint
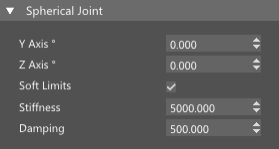
Y Axis - Limits rotation along the Y axis.
Z Axis - Limits rotation along the Z axis.
Soft Limits ??? Enable this option to create additional spring that will force joint back towards the limit using the stiffness and damping parameters.
Stiffness - Constraint stiffness.
Damping - Constraint damping.
Note: To simulate the swing doors for example, on would set both Y and Z axis limits to 0 and enable Soft Limits options. Stiffness would control the spring on the swing doors and it would dictate how fast the doors will return to initial position. Use Damping to decrease swing amplitude with time.
Prismatic Joint
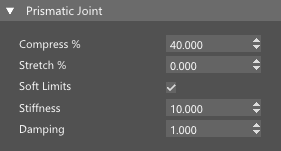
Compress % - Limits joint compression.
Stretch % - Limits joint stretch.
Soft Limits ??? Enable this option to create additional spring that will force joint back towards the limit using the stiffness and damping parameters.
Stiffness - Constraint stiffness.
Damping - Constraint damping.
Distance Joint

Distance Limits - Enables compress and stretch limits.
Compress % - Limits joint compression
Stretch % - Limits joint stretch.
Spring Limits - Enables spring limits
Prestretch - Scales initial distance between two particles. Values smaller than 1 will create tension in a joint - similar to a string on a crossbow.
Stiffness - Constraint stiffness.
Damping - Constraint damping.
Tear
Tear- Fiber can be torn is enabled.
Tear Force - Fiber will be torn if force exceeds this value.
Tear Torque - Fiber will be torn if torque exceeds this value.
Plasticity
Plasticity - Allow material to accumulate deformations which will then remain permanent.
Threshold - Stretch threshold after which the material will no longer be able to return to the previous state.
Rate % - The rate at which deformations will accumulate.
physx object
Adds a new actor to the PhysX.
[Inputs]
Enabled - Enable or disable node evaluation.
Solver - Select the PhysX solver to which actor will be added.
Sim Group - Object simulation group number.
Collide With Groups - Collision groups separated by a comma. Type Sim Group number for collision between objects within the same group.

Type - Object type.
- Dynamic - Dynamic actor motion is influenced by all PhysX forces.
- Kinematic - Kinematic actor`s motion is controlled directly by user while external forces will have no influence on it.
- Static - Static actor which can be used for immovable walls, floors etc..
Geometry - Actor geometry - available options will depend on the object Type.
- Sphere - A simple sphere with user defined radius.
- Bounding Box - Bounding box will be generated from particle shape bounding box.
- Convex Mesh - Convex mesh will be generated from particle shape mesh.
- Mesh - Actor will use particle shape.
Animated - Enable this option if geometry is changing during PhysX animation.
Bounce - Amount of bounce on object collision.
Static Friction - Static friction is defined as the frictional force which acts between the two surfaces when they are in the rest position with respect to each other. One example is a lamp on the table. If you tilt the table the lamp will start sliding at some point. Higher static friction would require greater table tilt in order to set lamp in motion.
Dynamic Friction - Dynamic friction is defined as the frictional force which is created between any two surfaces when they are in a moving position. One example of dynamic friction is a car tire on the asphalt.
Contact Offset - Contact offset between colliding actors. Keep this number as low as possible since large numbers will offset contact point too far from actual location on shape surface. This could lead to multiple simulation issues.
Rest Offset - Collision offset from object in rest state.
Angular Damping - Damping of actor`s angular velocity (spin).
Linear Damping - Damping of actor`s velocity.

Pos Iteration - Number of position iterations the solver should perform. If you are having trouble with jointed bodies oscillating and behaving erratically, then setting a higher position iteration count may improve their stability.
Vel Iterations - Number of velocity iterations the solver should perform. If intersecting actors are being separated too violently, increase the number of velocity iterations.
Max Impulse - Sets a limit on the impulse that may be applied at a contact. The maximum impulse at a contact between two dynamic or kinematic bodies will be the minimum of the two limit values. For a collision between a static and a dynamic body, the impulse is limited by the value for the dynamic body.
Max Linear Vel - Maximum linear velocity for an actor.t
Max Angular Vel - Maximum angular velocity for an actor.
Max Separation Vel - Sets the maximum depenetration velocity permitted to be introduced by the solver. If there are interpenetrating actors the solver will try to separate them which in some cases can lead to abrupt and explosive behavior. You can set this value to zero or some other very low value to eliminate this problem.
Pos X - Locks position along X axis.
Pos Y - Locks position along Y axis.
Pos Z - Locks position along Z axis.
Angle X - Locks angular velocity around X axis.
Angle Y - Locks angular velocity around Y axis.
Angle Z - Locks angular velocity around Z axis.